
Well I made progress on the solar tracker. All 3D printing done. Mechanical assembly done.
Next, I need to solder pins onto the ESP32 and wire it up and figure out where the two stepper driver boards go.

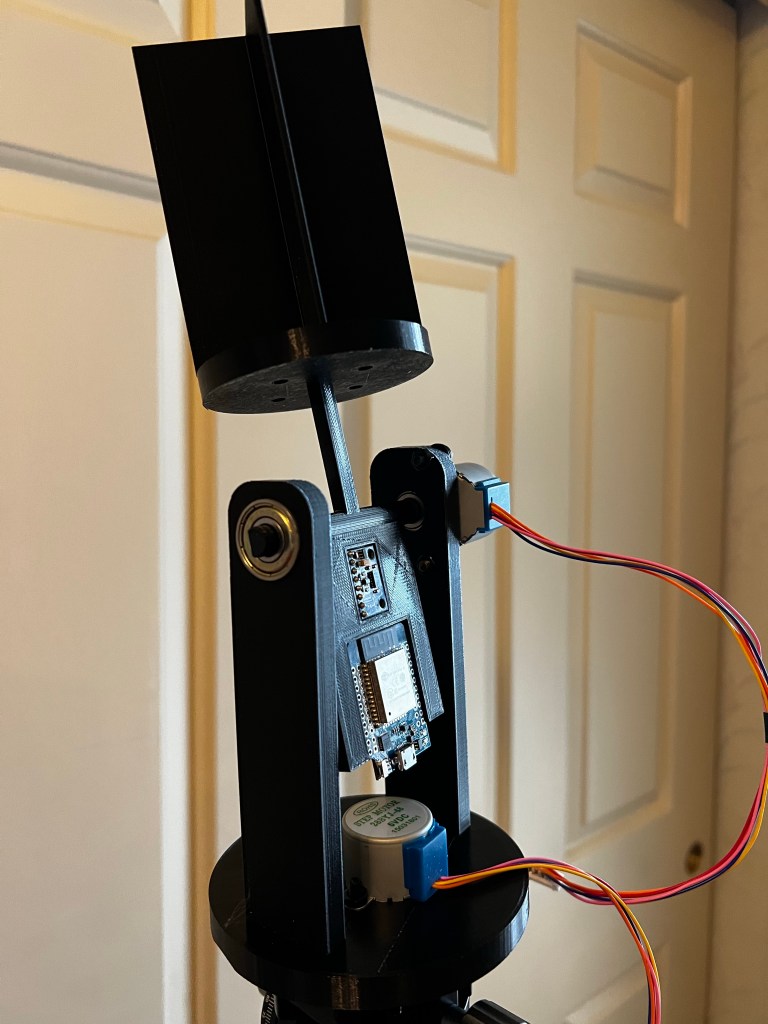
As you can see the electronics fit into recesses in the tilting platform. the smaller module is the magnetometer /accelerometer.
In practice, the azimuth axis needs to spin about 370 degrees while the code does compass calibration. Since the wiring between the esp32 and the stepper move together on the axis that wiring won’t be a problem, but the usb cable feeding power and serial will have to have enough slack for the full rotation.
On the alt axis, the wiring to the stepper only needs enough slack for 90 degrees of tilt. the software will prevent over rotation. However, again, the usb cable might be a problem as you can see there is not a lot of clearance for the connector between it and the stepper.
Once the software is finalized, io to the tracker will be over wifi, so instead of a usb cable, I should be able to attach batteries and a voltage regulator, so then only two power lines will attach to the esp32, making cableing easier.

