So I’ve built a star tracker, and with a 40mm lens and only using an iPhone compass and bubble level to polar align it, I was able to get 30 second photos without star trails.
But I need to push the envelope. I want longer exposures and now have an external intervalometer to do that, and I also want to be able to use my 18-200mm lens at 200mm.
Initial tests with the 18-200mm lens, again with iPhone alignment, said — I get star trails.. So I set it up level in the house, and ran it for a while with the camera on and the iPhone level on it, making casual readings with a stop watch, and for sure, the lens was probably too heavy for that little stepper and an 8mm pitch lead screw.
So I got a 4mm pitch lead screw, it should be able to lift twice as much right? Got up at some insane time of night and took photos at 200mm and got star trails.
Ok, so there are at least two things that cause this… ok 3 things. One is that the longer the lens the more inaccuracies of the whole setup will show and cause star trails. Two is that if the polar alignment is out… you get star trails, three if the system clock of the microcontroller is inaccurate, you get star trails.
So to get a lot more precise in looking for causes, I did this:
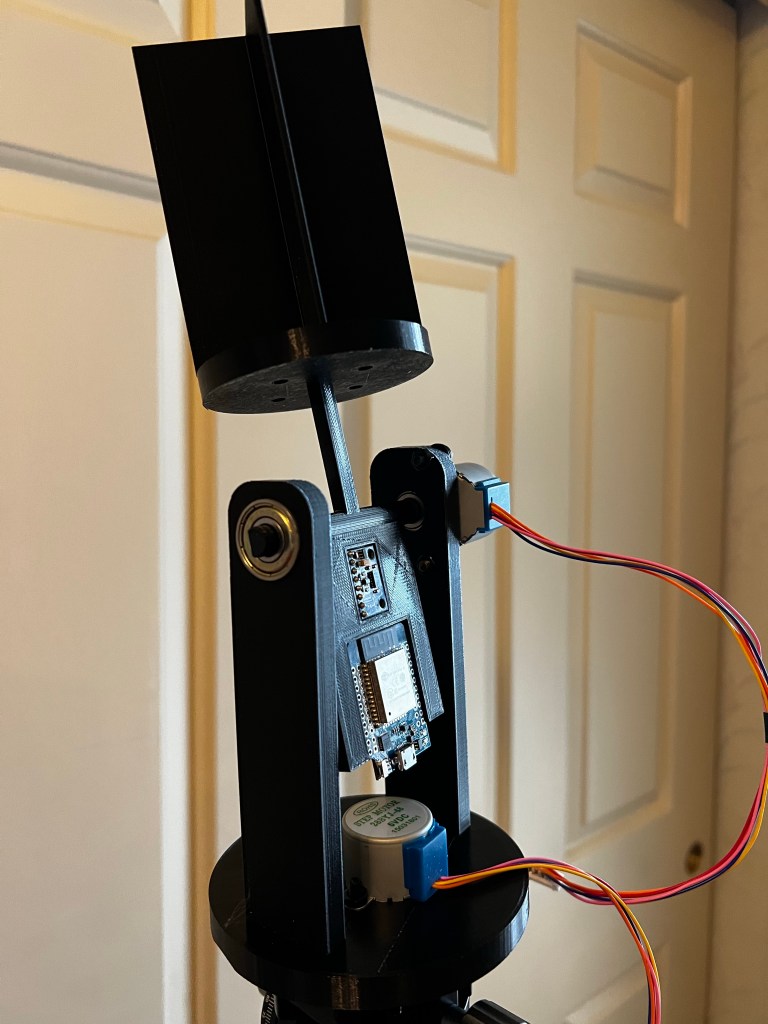
I set the tracker up level on a tripod in my house. I put a big X on white background registration mark at the pivot, and at the end of the arm that swings. And I made a 30fps HD video of it for about 16 minutes.
That’s the data collection, now for processing I loaded the movie file into blender and used object tracking to track those two marks for the 16 minutes of the video.
Then I played all day with blender… ok but really then I wrote a python script that transforms the swing arm tracker’s position so that the pivot position is the origin — for each frame and printed to a file the angle of rotation of the swing arm tracker about the pivot origin.
Now by subtracting the start angle from the end angle, I had the total degrees (Yes I work in degrees not radians 🙂 swung in 16 minutes… it should have been so close to 4 degrees it’s not funny. But it actually came out to 3.75 ish degrees which is 6% slow.
That and a bad polar alignment probably explains star trails… since the stars are rotating slightly faster than the camera. For short exposures, it might not be noticeable, but I want long exposures, and I believe I can do it with this tracker with a little work.
Let see, does this data imply that I “should” see star trails in a 60 second exposure… We can figure this out… Photo Pills will give the max exposure time for an untracked photo with a given camera and lens combination. For my camera and that lens it says the NPF rule for it says max exposure of .94 seconds before a noticeable star trail. Ok, so 6% of 60 seconds is 3.6 seconds.. so I should see star trails due to the difference between .94 and 3.6, and Yes I did. Also I also took exposures at 30 seconds – which are 1.8 seconds slow… again that’s greater than .94 seconds, and yes I saw trails.
So the barn door tracker is basically a sidereal clock. At the root of it is it’s dependence on an accurate system time, since the amount of turns per degree for the lead screw depends on how wide the hinge is already open… Unlike a tracker with a curved screw, this tracker has a straight screw so the steps per degree needs to be variable.
Well the system clock on the ESP32 is based on a quartz crystal and so that in itself is very accurate, but there are a plethora of other places inaccuracies come in. Like we’re dealing with physical things all manufactured to their individual tolerances… the screw is a 4mm pitch screw, but not exactly 4mm. The stepper has so many steps per revolution, and that should be accurate, but how accurate? The trigonometry used in the program to compute the number of steps at time T, depends on the dimensions of the tracker, The designer used the dimensions in the design files, but what I have is something printed on my printer… My printer prints things to pretty accurate dimensions, but accurate enough? How far of from ideal?
So you could go through the whole system looking for sources of inaccuracies… and try to refine things, but there is another approach….
So in 16 minutes I measured a 6% discrepancy in angle… (ooh.. there’s also inaccuracies in my measurements too), how consistent is that? Well looking at the star trails in a 1 minute exposure gives me nice clean looking trails… if there was any speeding up and slowing down cycle, or just changes in speed the thickness of the trails would not be nice and uniform.
So on the assumption that the system all together is slow, what I can do is make a longer measurement. Set it up again, and video it for like 2 hours (that max I’d want to use the thing without resetting it)… and run that through my Blender code. From that I should be able to make a time dependent correction factor to the number of steps needed at any given point in time to bring it into correct timing.
It’s worth a try — alternatively I say — well this was fun— and spend thousands on a manufactured equatorial mount, and a guide scope… Thousands. Of. Dollars.
I think I’ll try the hardware hacking approach.